EdgeMethod
Funktionsbeschreibung und Anwendung
Der Edge Method-Block (Edge Method Invocation) ruft eine Edge Method auf und leitet deren Ergebnis in Abhängigkeit des Erfolgs an einen weiteren Processing- oder Output-Block weiter.
| Parameter | Beschreibung |
|---|---|
Name |
Name der Blockinstanz. |
Method |
Name der Methode, die aufgerufen werden soll. |
Parameter |
Liste von konstanten Parametern zum Aufrufen der Methode |
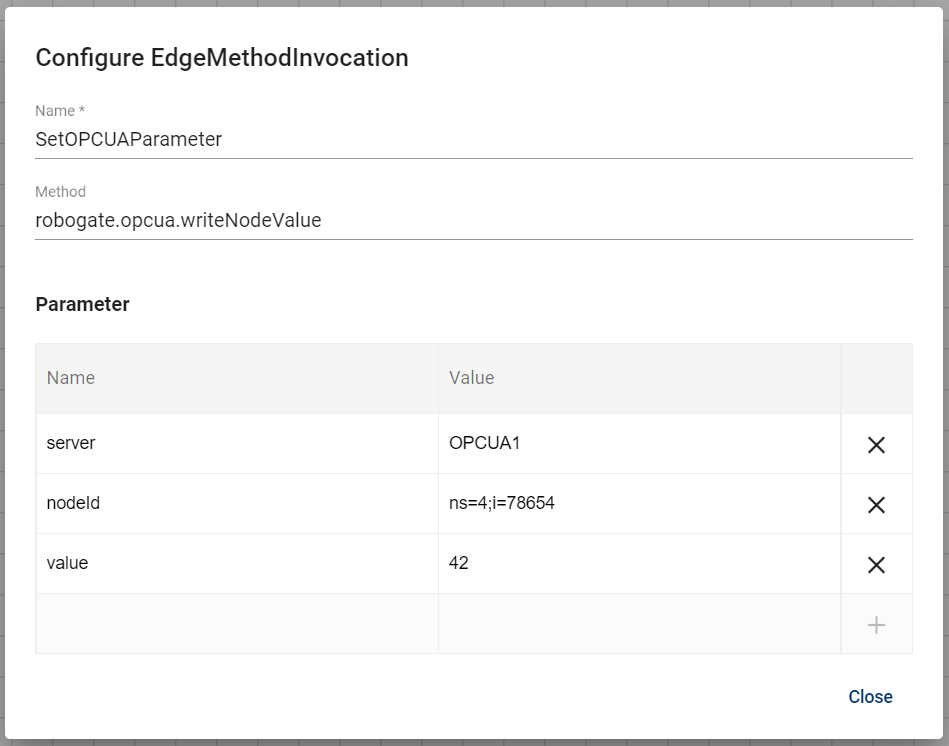
Beispiel: Aktualisieren eines OPC UA Nodes
Im Beispiel wird ein OPC UA Node gesetzt, sobald eine Nachricht den Block auslöst.
Häufig verwendete Methoden
Im Folgenden werden Methoden des RoboGate Edge beschrieben, welche sich für Verwendung zusammen mit dem Edge Method-Block eignen.
robogate.opcua.writeNodeValue
Methode des OPC UA-Moduls. Setzt einen Node eines konfigurierten OPC UA Servers auf einen konstanten Wert.
| Parameter | Beschreibung |
|---|---|
server |
Name des konfigurierten Servers |
nodeId |
Node ID des zu setzenden Nodes |
value |
Wert des Nodes |
robogate.opcua.readNodeValue
Methode des OPC UA-Moduls. Liest den Wert eines Nodes eines konfigurierten OPC UA Servers.
| Parameter | Beschreibung |
|---|---|
server |
Name des konfigurierten Servers |
nodeId |
Node ID des zu setzenden Nodes |
value |
Wert des Nodes |
Antwortnachricht
| Property | Beschreibung |
|---|---|
val |
Ausgelesener Wert |
robogate.rfc1006.readSignal
Methode des RFC1006-Moduls. Liest einen Wert aus einem Speicherbereich einer konfigurierten PLC.
| Parameter | Beschreibung |
|---|---|
plc |
Name der konfigurierten PLC |
dataType |
Speichertyp auf PLC
|
dataBlock |
Name des DataBlocks (Bei DataType DataBlock) |
startByte |
StartByte des auszulesendes Wertes im Speicherbereich |
count |
Anzahl der zu lesenden Bytes des Speicherbereiches |
bit |
Zu lesendes Bit innerhalb des zu lesenden Bytes (bei VarType = Bit) |
varType |
Datentyp in den der gelesene Wert konvertiert werden soll
|
Antwortnachricht
| Property | Beschreibung |
|---|---|
value |
Ausgelesener Wert |
robogate.rfc1006.writeSignal
Methode des RFC1006-Moduls. Schreibt einen Wert in einen Speicherbereich einer konfigurierten PLC.
| Parameter | Beschreibung |
|---|---|
plc |
Name der konfigurierten PLC |
dataType |
Speichertyp auf PLC
|
dataBlock |
ID des DataBlocks |
startByte |
Start Byte des zu lesendes Wertes im Speicherbereich |
varType |
Datentyp in den der gelesene Wert konvertiert werden soll
|
value |
Zu schreibender Wert |
modbus-testread
Methode des Modbus-Moduls. Liest einen Wert aus einem konfigurierten Modbus Slave.
Parameter |
Beschreibung |
serverInstance |
Name des konfigurierten Modbus |
slaveId |
ID des auszulesenden Slaves im Modbus |
functionCode |
Modbus Function Code
|
registerStartAddress |
Startadresse des zu lesenden Speicherbereichs |
registerLength |
Länge des zu lesenden Speicherbereichs in Words (2 byte) bei FunctionCodes 3 und 4 |
type |
Datentyp in den der augelesene Wert konvertiert werden soll
Bei FunctionCodes 1 und 2: Bool, Länge 1 |
valueGain |
Konstanter Faktor des gelesenen Wertes, um richtigen Wert zu erhalten (Default: 1.0) |
valueOffset |
Konstante Verschiebung des gelesenen Wertes, um richtigen Wert zu erhalten (Default: 0.0) |
isLittleEndian |
Wenn true, interpretiert beim Lesen des Wertes das erste gelesende Byte als kleinstwertiges Byte. (Default: false ⇒ big-endian) |
Antwortnachricht
| Property | Beschreibung |
|---|---|
resultCode |
Ergebnis Code ("Ok" oder "Error") |
data.Variable |
Ausgelesener Wert |
robogate.set_led
Diese Methode ist nur bei RoboGate Devices powered by Turck verfügbar. Konfiguriert das Blinkverhalten einer HMI LED am Gerät.
| Parameter | Beschreibung |
|---|---|
name |
Name der LED
|
modus |
Blink Modus
|